
|
| |
|
|
Главная » Книги и журналы 1 2 3 4 5 6 7 ... 22 При увеличении тока управления /у = Uy/Ry увеличивается угол Ojj, и при/y>t/ м Шр ?нКу оба магнитопровода усилителя в течение всего периода питающего напряжения будут находиться в насыщенном состоянии. Ток нагрузки в этом случае максимален, равен 1в.ыакс~п.и/ Rh зависит от тока управления. Характеристика вход -выход простейщего идеализированного магнитного усилителя (рис. 3-1, а), показывающая зависимость тока нагрузки (его среднего значения) от величины тока управления, приведена на рис. 3-2 (кривая /). Линейная зависимость I.cp /у имеет место для/ .р:0,844/3.При больших токах, как было отмечено выше, вследствие одновременного насыщения обоих сердечников магнитного усилителя линейность характеристики нарушается, а при /у =(1,2н-1,3) - /у.макс через нагрузку протекает максимальный ток, не зависящий от тока управления. 0,8 0,6 0,4 о,г
Рис. 3-2. Характеристика вход-выход простейшего идеализированного магнитного усилителя. / - прн большом сопротивлении управляющей цепи; 2 - при малом сопротивлении управляющей цепи. 0. 0,2 0,4 0,6 0,8 1,0 1,г 1,4 Для простейшего магнитного усилителя коэффициент усиления по току И по- мощности /1ср н R. [Щ \ Ру ~ llRy Ry [wj где Д / и Д /у - соответственно приращение тока нагрузки и вызвавшее его приращение тока управления; Рн и Ру - мощность нагрузки и мощность управляющей цепи. Нетрудно видеть, что при выборе Ry (Wg/Wy) > R усилительные свойства данного магнитного усилителя неудовлетворительны. Условием значительного усиления мощности является выполнение соотношения Ру (и)р/и)у) < н- При этом, однако, в цепи-управления магнитного усилителя появляется значительная переменная составляющая тока. Временные диаграммы токов нагрузки и -управления, питающего напряжения и индукции в обоих сердечниках для данного случая приведены на рис. 3-3. В интервале О о<<:ав оба магнитопровода магнитного усн- лителя (CM. рис. 3-1, a) не насыщены и ток в цепи нагрузки практически не про- текает. В момент <й/=ав происходит насыщение одного из магнитопроводов, напри-мер А, последовательно с нагрузкой оказывается включено сравнительно малое сопротивление цепи управления, пере- д считанное в цепь рабочей обмотки ненасыщенного магнитопровода Б. На интервале г„, ав<й< Я ток нагрузки и„ практически пропорционален напряжению питания и сопротивлению нагрузки. Характеристика вход-выход идеализированного усилителя для о данного режима изображена в виде прямой 2 на рис. 3-2. Для реальных магнитных усилителей (см. рис. 3-1, а) характер происходящих процессов и характеристики вход - выход достаточно точно соответствуют рассмотренным выше. Наиболее принципиальное отличие характеристик наблюдается при отсутствии тока управления (/у=0). Если для идеализированного усилителя в этом случае было справедливо условие Ун=0, то для реального /н = /х.г, где /х.х - ток холостого хода магнитного усилителя, обусловленный потерями в магннтопроводах на гистерезис, вихревые токи и магнитную вязкость материала. Ток холостого хода магнитного усилителя возрастает Рис. 3-3. Временные диаграммы, иллюстрирующие работу идеализированного магнитного усилителя в случае малого сопротивления управляющей цепи. 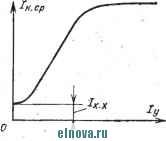 Рис. 3-4. Характеристика вход-выход реального магнитного усилителя. по мере уменьшения прямоугольности петли гистерезиса используемого магнитного материала. Характеристика вход - выход реального магнитного усилителя имеет вид, показанный на рис. 3-4. Более совершенными по сравнению с рассмотреннымн выше являются магнитные усилители с внутренней положительной обратной связью. В таких устройствах изменение магнитного состояния каждого из сердечников под действием управляющего сигнала происходит при обесточенной рабочей обмотке, для чего в схему уси-аителя вводят полупроводниковые диоды. Одна из наиболее распространенных схем усилителей данного типа приведена на рис 3-5,а. Временные диаграммы, иллюстрирующие работу идеализированного магнитного усилителя с положительной обратной связью на нагрузку активного характера, приведены на рис. 3-5, б.. Пусть полупериод 0<(0<я является рабочим для магнитопровода А и управляющим для магнитопровода Б. Это означает, что полярность питающего напряжения соответствует открытому H>t-r-t 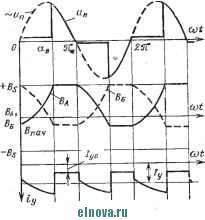 Рис. 3-5. Магнитный усилитель с внутренней положительной обратной связью (а) и временные диаграммы, иллюстрирующие его работу (б) состоянию диода Д\ и закрытому состоянию диода Д^- Рабочая о'бмотка Шр включена последовательно с нагрузкой, а рабочая обмотка ШрОТ источника переменного тока отключена. В интервале 0<:(0<<ав через нагрузку протекает малый ток холостого хода магнитного усилителя. Магнитная индукция в магнитопроводе А изменяется от своего начального значения -В нач до значения индукции насыщения Bs. когда происходит насыщение магнитопровода А. Длительность угла равна: (Bs -Вцач \ -б-/ где Bm = UjjY-4,4iWpfQijkc - рабочая индукция в магнитопроводе; {/ -амплитуда питающего напряжения; Шр - число витков рабочей обмотки; f - частота питающего напряжения; Qct и fecT -соответственно площадь сечения магнитопровода и коэффициент заполнения его ферромагнитным материалом. После насьш1ения магнитопровода А его магнитная проницаемость и падение напряжения на рабочей обмотке р%зко падают, и практически все напряжение питания прикладывается к нагрузке. В интервале ав<(о/<я ток нагрузки определяется напряжением питания и сопротивлением нагрузки, а его среднее значение равно; Вя - Вн в интервале 0<сй/<с:ав в обмотке управления магнитопровода А наводится э.д.с, обусловленная изменениями магнитной индукции. Эта же э.д.с. вызывает перемагничивание магнитопровода Б, рабочая обмотка которого при этом обесточена. Для рассматриваемого случая скорости изменения магнитной индукции в обоих сердечниках усилителя одинаковы (рис. 3-5,6), а индукция в магнитопроводе Б в интервале 0<:(о/<:ав изменяется от значения -ьВдо значения -Внач- После насыщения магнитопровода А значения индукции в обоих магннтопроводах остаются неизменными до конца данного полупериода питающего напряжения. Следующий полупериод K<CKit<c2n является рабочим для магнитопровода Б и управляющим для А. К его концу магнитная индукция в первом магнитопроводе достигает значения -f-Bj, а во втором - значения -В нач- Далее процессы в магнитном усилителе повторяются. Как следует из последней формулы, регулирование нагрузочного тока и напряжения на нагрузке можно осуществить за счет
Рис. 3-6. Характеристика вход-выход магнитного усилителя с положительной обратной связью. изменения отнощения В„ч1Вт- Характеристика вход-выход идеализированного магнитного усилителя (рис. 3-5, а) имеет вид, показанный сплощной линией на рис. 3-6. В интервале значений 0: /у /у.мин I происходит регулирование напряжения иа нагрузке и тока нагрузки в функции тока управления. Значение/у .мнн на рис. 3-6 соответствует максимальному значению тока холостого хода магнитного усилителя и минимальному значению тока нагрузки. При таком значении управляющего тока магнитопроводы успевают насыщаться лищь к концу каждого полупериода питающего напряжения. , Участок характеристики (рис 3-6), соответствующий /у 1 > I/у.мин|. называется областью отрицательной обратной связи. Здесь к концу первого рабочего полупериода 0<сй/<я индукция в магнитопроводе Л не достигает значения индукции насыще- ния 6 s- Однако под действием управляющего сигнала на этом интервале происходит насыщение магнитопровода Б - индукция в нем, спустя некоторое время от начала полупериода, достигает' значения --Bg- В области отрицательной обратной связи магнитный усилитель имеет такие же свойства, как и усилитель без обратной связи. На характеристики реальных магнитных усилителей с обратной связью существенное влияние оказывает постоянный обратный ток используемых полупроводниковых диодов Д\ и Дг (рис. 3-5, а). Увеличение этого тока эквивалентно уменьщению положительной обратной связи и приводит к уменьщению коэффициента усиления магнитного усилителя, т. е. к уменьщению крутизны его характеристики вход-выход (см. пунктир иа рис. 3-6). Для расщирения. диапазона регулирования напряжения на нагрузке ток покоя реального усилителя целесообразно уменьшать, вводя дополнительную обмотку смещешРя, которая создает в магнитопроводах магнитный поток, направленный навстречу потоку, вызванному действием токов в рабочих обмотках усилителя. Так как постоянный обратный ток реальных полупроводниковых диодов изменяется при изменении температуры окружающей среды, то характеристики магнитных усилителей с положительной обратной связью оказываются нестабильными в диапазоне' температур. Для повышения их стабильности иногда используют шунтирование диодов резисторами, однако при этом коэффициент усиления магнитного усилителя падает. Основные преимущества магнитных усилителей с положительной обратной связью заключаются в большом усилении по мощности (коэффициент усиления таких усилителей может достигать нескольких тысяч), возможности электрической изоляции силовых целей и цепей управления, простоте исполнения, возможности управления несколькими сигналами различного уровня от электрически изолированных друг от друга источников и т. п. ~ , Простейшая схема тиристорного регулятора напряжения переменного тока изображена на рис. 3-7, а. Здесь два тиристора Д1 и Д2 соединены между собой встречно-параллельно и включены последовательно с нагрузкой в цепь источника переменного тока. Управление тиристорами осуществляет схема управления СУ, которая открывает Д1 и Д2 со сдвигом во времени друг относительно друга, равным половине периода питающего напряжения. Момент открывания каждого из тиристоров относительно начала соответ- ствующего полупериода определяется внешним сигналом управления. Изменяя его, можно регулировать напряжение на нагрузке вследствие изменения длительности открытого состояния каждого из тиристоров регулятора. Закрывание тиристоров происходит под действием приложенного к ним напряжения обратной полярности в момент, когда ток, протекающий через открытый тиристор, уменьшается до своего нулевого значения. Временные диаграммы, иллюстрирующие работу данного регулятора для случая активной нагрузки, приведены на рис. 3-7, б. Пусть в момент времени (oi=0 питающее напряжение Г' Un изменило свою полярность, пройдя через нулевое значение. До момента времени wt=aB оба тиристора закрыты и напряжение иа нагрузке равно нулю. Все питающее напряжение приложено к тиристору Д1 в прямом направлении, а к тиристору Д2 -в обратном. В момент Ы=а схема управления подает в цепь управляющего электрода тиристора Д1 импульс управляющего тока lyu вследствие чего данный тиристор открывается, падение напряжения на нем резко уменьшается до малого значения и практически все напряжение питания прикладывается к нагрузке. Тиристор Д\ будет открыт в течение остальной части полупериода, пока ток в цепи нагрузки не уменьшится до нулевого значения. В рассматриваемом случае активной нагрузки этот момент совпадает с моментом прохождения питающего напряжения через свое нулевое значение сй/=л;. После смены полярности напряжения питания на обратную оба тиристора вновь оказываются закрытыми. При этом напряжение на тиристоре Ду имеет обратную полярность, а на тиристоре Дг -прямую. В момент я 4-а в от схемы управления подается импульс управляющего тока /у2 в цепь управляющего электрода тиристора Дч, который открывается. Напряжение питания вновь прикладывается к нагрузке. При очередном прохождении питающего напряжения через нулевое значение ти- 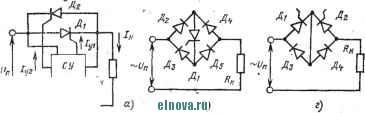 Сигнал 1 управления 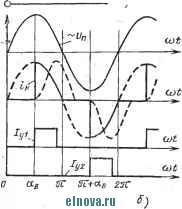 Рис. 3-7. Тиристорные регуляторы напряжения переменного тока (а, в, г) н временные диаграммы, иллюстрирующие работу простейшего регулятора (б). ристор Дг выключается. Далее процессы в регуляторе повторяются. Задерживая момент открывания каждого из тиристоров относительно начала соответствующего полупериода питающего напряжения (т. е. увеличивая а^), можно уменьшать длительность их открытого состояния и напряжение на нагрузке. Наоборот, при уменьшении в напряжение на нагрузке увеличивается. При работе рассматриваемого регулятора на индуктивно-активную нагрузку характер процессов несколько отличается от случая чнсто активной нагрузки (см. пунктир на рис. 3-7,6). После открывания каждого из тиристоров регулятора ток нагрузки napaqjaeT более медленно и спадает до своего нулевого значения спустя некоторое время после прохождения через нулевое значение питаю- щего напряжения. В результате этого закрывание тиристоров Дх и Д2 не совпадает с концом соответствующего полупериода питающего напряжения и форма тока в нагрузке значительно отличается от случая активной нагрузки. Простейщий тиристорный регулятор переменного напряжения (рис. 3-7, а) для своего управления требует фазосдвигающее устройство с двумя электрически изолированными друг от друга выходами. Кроме того, тиристоры должны выдерживать и прямое, и обратное напряжение, равное напряжению питания. Схема тиристорного регулятора на рис. 3-7, в содержит мостовую схему выпрямления, в диагональ которой включен тиристор Здесь к тиристору напряжение обратной полярности не прикладывается, а его выключение происходит в момент равенства нулю протекающего через него тока. В регуляторе, схема которого приведена на рис. 3-7, -з, -использованы два тиристора с объединенными катодами, которые являются элементами мостовой схемы выпрямления. При таком включении тиристоров не требуется электрической изоляции друг от друга цепей управления, в результате чего значительно упрощается схема управления регулятора. В современных регуляторах (стаб(лизаторах) напряжения переменного тока весьма перспективным является использование симметричных триодных тиристоров (симисторов) в качестве силовых рег^лирующкх элементов. Способность симметричного тиристора пропускать ток в обоих направлениях и возможность регулирования момента его открывания в обоих полупериодах питающего напряжения с помощью сигнала управления, подав'аемого в цепь управляющего электрода, приводят к тому, что такой регулятор содержит наименьщее число силовых элементов (см. рис. 2-15, и) и имеет наиболее простую схему управления. Для тиристорных регуляторов напряжения переменного тока, работающих на активную нагрузку, среднее значение выходного напряжения f/ggp определяется из формулы . .ср=-%(1+С08ав). (3-1) а его эффективное значение i/ эф равно: ~ - и / sin 2 Ов -* = W у - в+--(3-2) В обоих выражениях fj, соответствует амплитуде напряжения питания, а к в- относительной (по отнощению к полуперноду питающего напряжения) длительности закрытого состояния тиристоров или ненасыщенного состояния магнитного усилителя. Коэффициент формы напряжения на нагрузке, равный отношению эффективного значения выходного напряжения регулятора к его среднему значению, определяется выражением А Я / sin 2 Ов \ у -2-(jt-aB-f-2-/ (3-3) . -и..ср . l-fCOSOB Зависимость /( фр от приведена на рис. 3-8. Данная кривая характеризует относительное изменение действующего значения выходного напряжения регулятора при поддержании среднего значения выходного напряжения постоянным. Нетрудно видеть, что рассматриваемые регуляторы не могут обеспечить одновременную стабилизацию и среднего, и эффективного значений напряжения на нагрузке. Поэтому в тех случаях, когда требуется стабилизировать оба указанных параметра, на выходе стабилизатора приходится включать фильтр, выделяющий основную гармонику переменного напряжения, и ее стабилизировать. Рис. 3-8. Зависимость коэффициента формы выходного напряжения от угла в- о 30 ео 30 120 rsOrpad При стабилизации выходного напряжения по действующему значению выражение регулировочной характеристики, имеет вид: п.м.мин V и„ ., 1/ irt - Ов Н- sin 2 ав/2 а при стабилизации по среднему значению -вид и„ 2 1 -j- cosob (3-4) (3-5) На рис. 3-9 приведены зависимости в, обеспечивающего постоянство действующего и среднего напряжения на нагрузке, в функции коэффициента In = i/п.м.макс/п.м.мнн 1Z0 100 80 60 W 20 О
Рис. 3-9. Зависимости Ов от \а при стабилизации среднего значения напряжения на нагрузке (кривая /) и его эффективного значения (кривая 2). / 1,г 1,4 1,6 1,8 г,0 Z,Z 2,t К недостаткам простейших регуляторов напряжения переменного тока относятся значительные искажения формы напряжения на нагрузке, которые обусловлены принципом их действия. В процессе регулирования напряжения на нагрузке значительно изменяется его гармонический состав, в кривой напряжения появляются высшие гармоники, эффективные значения которых возрастают по мере расширения пределов регулирования. Так, например, при 1п=1,5 эффективное значение 3-й гармоники составляет примерно 55%, а 5-й - 20% эффективного значения основной гармоники иапряжения на нагрузке. Рассмотренные регуляторы позволяют регулировать выходное напряжение в широких пределах или обеспечивать стабилизацию его значения при значительных изменениях напряжения питания. Однако энергетические показатели самих регуляторов за счет искажения формы кривой выходного напряжения ухудшаются даже при активной нагрузке. На рис. 3-10 приведены схемы силовой части регуляторов (стабилизаторов) напряжения переменного тока, которые при высоком к.п.д. обеспечивают регулирование (стабилизацию) напряжения на нагрузке при значительно меньших искажениях его формы. В схеме, изображенной на рис. 3-10, а, использованы два тиристорных ключа переменного тока (см. рис. 3-7, а), подключенных к отпайкам 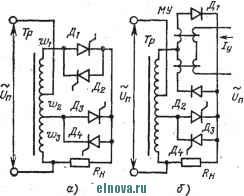 7> Рис. 3-10. Основные схемы однофазных регуляторов со ступенчатым регулированием. обмотки автотрансформатора. В схеме, изображенной на рис. 3-10,6, один из таких ключей заменен магнитным усилителем МУ. Регулятор (стабилизатор) напряжения переменного тока, схема которого приведена на рис. 3-10, е, выполнен на трех управляемых тиристорных ключах с двухсторонней проводимостью. Рассмотрим работу на нагрузку активного характера наиболее распространенной на практике схемы (рис. 3-10, а). Пусть в начале положительного полупериода питающего напряжения произошло открывание тиристора Дз (рис. 3-11). При этом к нагрузке 7?и прикладывается переменное напряжение, равное Ин = п Wz + Ws тт и„, п -мгновенные значения напряжений на нагрузке н в питающей сети; W2, Шз -числа витков соответствующих секций обмотки автотрансформатора. . - - в момент (o/i=aB (рис. 3-11) открывается тиристор Дь а ранее открытый тиристор Дз закрывается под действием напряжения обратной полярности на обмотках о), и Шг- Напряжение на нагрузке увеличивается до напряжения И)! + а)2 + Шз н = п И)2 Ч-ВИЗ Рис. 3-11. Форма напряжения на выходе однофазного регулятора со ступенчатым регулированием при нагрузке активного характера. В отрицательном полупериоде питающего напряжения процессы в рассматриваемой схеме повторяются. Значения Wi-Шд рассчитываются по формулам [10]: 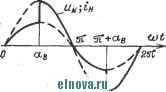 Wi = (w + W3) п.макс н =- .. t- 3 = 2 где Фт - магнитный поток в магнитопроводе автотрансформатора. Временные диаграммы напряжения на нагрузке и тока в ней для случая нагрузки индуктивно-активного характера приведены на рис. 3-12. Здесь в интервале 0<со/<рв. несмотря на то, что напряжение питания изменило свою полярность, ранее открытый Рис. 3-12. Форма напряжения на нагрузке и тока нагрузки для однофазного регулятора со ступенчатым регулированием при индуктивно-активной нагрузке. тиристор Дг остается открытым, так как через него протекает прямой ток. В момент (й<=Рв, когда этот ток становится равным нулевому значению, тиристор Дг закрывается. В этот же момент под действием сигнала от схемы управления открывается тиристор Дз, который будет пропускать в нагрузку ток в течение интервала Рвю/Ов, в конце которого происходит открывание тиристора Дь При (й/=ав тиристор Дг закрывается под действием напряжения обратной полярности. В дальнейшем процессы повторяются. 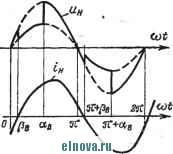 1 2 3 4 5 6 7 ... 22 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||