
|
| |
|
|
Главная » Книги и журналы 1 ... 29 30 31 32 33 34 35 ... 38 Такты 52. и? 31/п, Контроль В1 гистерезиса 3 \з2. Цифрадая 37 КИ07ПВ4- i3 \15 1-йр S-йр Ug.,==2,SB 9-йр г-йр 4-й р ю ре 19 Ji? , гйр ЩА.налогоВая 6-йр 8-и р Рис. 11.14. Схема разводки выводов БИС К1107ПВ4 в АЦП последовательного приближения и аналогичных им по быстродействию (следящих или использующих ступенчатое приращение напряжения) на точность работы существенное влияние оказывает постоянство входного аналогового сигнала в течение времени его преобразования в цифровое слово. Чем длительнее время преобразования, тем большее влияние на его точность могут оказать изменения напряжения питания, помехи и шумы. Их источником является в первую очередь УВХ, практически всегда используемое на входе АЦП указанных типов. В режиме выборки УВХ выполняет функцию /буферного повторителя, исключающего влияние выходного сопротивления источника аналогового сигнала. По команде в виде цифрового сигнала УВХ переходит в режим хранения и на выходе сохраняется значение входного напряжения, достигнутое в момент подачи команды (см. гл. 8), Изменение этого напряжения из-за нестабильности напряжения питания УВХ, помех, вызванных переключением цифровых схем в приборе и из-за шумов в УВХ приводит к тому, что реальная точность преобразования в АЦП указанных типов не превышает 12 разрядов. Существенно повысить точность преобразования удается при использовании интегрирующих АЦП. Метод двухтактного интегрирования использован при построении БИС К572ПВ2 (рис. 11.15). Этот АЦП допускает обработку входных сигналов, источник которых не связан по общей шине с U . При этом напряжение между выводами 9 w 24 должно быть в диапазоне 2,4...3,2 В. При использовании (Уоп = 0 1 В необходимо установить Ci=Cf,47 мкФ, R\ = = 47 кОм, С2=1 мкФ. Если (7оп=1 В, то следует выбрать С| = = 0,047 мкФ, /?1=470 кОм, С2 = 0,1 мкФ. Подключаемый к выводу 21 конденсатор должен иметь емкость, рассчитываемую из выражения С=4,5/, мкФ. Частота определяется постоянной времени /?С-цепи, подключаемой между выводами 21 и 22. Вместо 7?С-цепи между этими выводами можно включить кварцевый резонатор. Допускается подача на вывод 23 тактовых импульсов от внешнего генератора. Чтобы проконтролировать правильность работы АЦП, необходимо выводы 20 и 2/ объединить. При этом цифровые индикаторы должны показать число 1888. АЦП практи- чески Hfe влияет на напряжение в контролируемой точке благодаря тому, что его входное сопротивление больше 30 МОм. Коэффициент ослабления синфазного напряжения достигает 100 мкВ/В, а погрешность преобразования около 0,01%. Для полного использования возможностей АЦП необходимы низковольтные источники опорного напряжения (меньше 5 В) с нестабильностью лучше 0,01%. БИС К572ПВ2 предназначена для работы непосредственно на семисегментные цифро-знаковые индикаторы типа АЛС324Б, благодаря чему на ее основе можно строить миниатюрные прецизионные цифровые вольтметры. Рекомендуемые значения тактовой частоты 40, 50, 100, 200 кГц. БИС К572ПВ2 в настоящее время широко применяется в разнообразных приборах контрольно-измерительной техники. У этой БИС нет в отечественной промышленности конкурентов по разрешающей способности, помехозащищенности, способности автоматического определения полярности входного напряжения и коррекции нуля. Дополнительно расширить возможности БИС КР572ПВ2 позволяет введение режима внешнего запуска и получение на выходе стандартного цифрового кода [69]. В обычном режиме работы на выводе 38 присутствуют импульсы тактовой частоты, вырабатываемые внутренним тактовым генератором. При работе с внешним запуском к выводу 38 подключается схема, показанная на рис. 11.15, б. Эта схема по сигналу запуска формирует пачку из 16 004 импульсов, за время поступления которых происходит полный цикл преобразования аналогового сигнала в код. Поступлением этих импульсов на БИС КР572ПВ2 управляет транзистор, который шунтирует вывод 38 в паузах между циклами преобразования. При этом АЦП работает от внутреннего тактового генератора с кварцевым резонатором, включенным между
8 to 13 1 СЧ1 . 2 ff 25 2в 27 28 29 3 3? 32 3S S4 J5 5 J7 J8 39 7 В lots i 2 tt 40 Ли 7) (га) (23) Щ 1тш,5)Ш (ЩЩШтзтше) 0,1мк 1М 9 1Z ti Щгг ZiZi 25 3 K564TMZ- noal К564ЧЕ15 12 13 14 H/5 ЛоЩ, пуск К564ГМ2 k/Crj/5 - U4 116 т72ПВ2 Рис. 11.15. Схемы подключения к БИС КР572ПВ2 и К572ПВ2 семисегментных светоиндикаторов (а) и цепи внешнего запуска (б) выводами 39 и 40. В момент включения напряжения питания БИС АЦП устанавливается в исходное состояние. Затем по фронту импульса запуска закрывается транзистор и включается генератор тактовых импульсов. Тактовые импульсы одновременно начинают поступать на входы делителя частоты К564ИЕ15 и БИС КР572ПВ2. При прохождении 16 004 тактовых импульсов от внутреннего тактового генератора КР572ПВ2 на выходе делителя формируется сигнал, переключающий триггеры D1, D2, на выходе D2 устанавливается высокий уровень напряжения и транзистор насыщается, прерывая цикл преобразования. При этом на выходах АЦП сохраняется результат преобразования до поступления следующего импульса запуска. Если же импульс запуска поступит до заверще-ния цикла преобразования, то схема на него не отреагирует. В качестве вспомогательного сигнала завершения преобразования можно использовать короткий прямоугольный импульс на выходе триггера D1. Преобразование выходного кода КР572ПВ2, предназначенного для работы на семисегментные светоиндикаторы, в обычный двоично-десятичный код можно осуществить с помощью программируемых БИС КР556РТ4. Их программирование осуществляется в соответствии с таблицей, приведенной в [69]. Адресные входы ППЗУ подключаются к выводам КР572ПВ2 вместо индикаторов. Кроме АЦП общего применения выпускаются специализированные преобразователи аналоговых сигналов, к которым относят преобразователь напряжение-частота и частота-напряжение К1108ПП1. На рис. 11.16 и 11.17 показано,. как с помощью К1108ПП1 преобразовать в частоту положительное и отрицательное напряжения и частоту в напряжение. Благодаря использованию на выходе транзистора с открытым коллектором можно подключить к выходу преобразователя как ТТЛ, так и КМОП логические схемы. Частотный диапазон определяется внешней /?С-цепью. Линейность преобразования, равная 0,01%, сохраняется до частоты 10 кГц. ~У R4 R5 *о П 12 \ Ю бых 8,2. и: ]1S\ 56 1 Рис. 11.16. Схемы преобразователей напряжение-частота на базе микросхемы К1108ПП1 при положительном (а) и отрицательном (б) входном сигнале 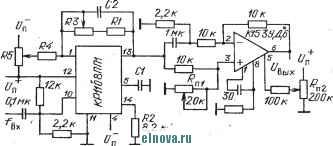 Рис. 11.17. Схема преобразователя частота-напряжение на базе К110811111 При частоте 0,1 МГц линейность падает до 0,05% и равна примерно 0,2% при частоте входного сигнала, равной 0,5 МГц [70]. В преобразователях положительного и отрицательного напряжений в частоту на базе К1108ПП1 диапазон входного сигнала определяется значениями R1, С1 и С2 (рис. 11.16). Коэффициент передачи можно отрегулировать с помощью R3. Цепь резисторов R4R5 используется для регулировки напряжения смещения. Сопротивление R2 выбирается так, чтобы протекающий через него ток и ток, отбираемый из нагрузки по цепи вывода 7, были в сумме меньше 8 мА. Сопротивление R1 определяет ток заряда емкости интегратора С2. Значение R1 выбирается из условия Rl = = [(/вхшах (0,9 -Дс)]/0,25 кОм, где Ивхтах - максимальнос изменение Lbx, Ас - относительный рззброс емкости С1. Температурный дрейф R1 непосредственно влияет на точность преобразования и должен быть минимален. Диапазон регулировки сопротивления R5 должен находиться в пределах 10... 100 кОм, а его температурный дрейф не должен превышать 10 /° С. Сопротивление RIO МОм, а /?з~0,2/?1. Чтобы отрегулировать коэффициент передачи и напряжение-смещения нуля, необходимо произвести следующую процедуру. Подать на вход напряжение, при котором выходная частота должна составлять \0~fnax- Если это не выполняется, то подрегулировать сопротивление R5. Затем подать на вход максимальное входное напряжение и установить с помощью R3 на выходе fmax-Максимальная точность преобразования получается, если нестабильность не превышает 1%. Выводы питания необходимо шунтировать конденсаторами емкостью 0,1 мкФ. При работе БИС К1108ПП1 в режиме преобразователя частота-напряжение потенциал вывода 10 равен 2,5 В (рис. 11.17). На вход подаются ТТЛ сигналы. Преобразователь срабатывает по срезу импульсов. При использовании других логических сигналов необходимо следить за тем, чтобы при передаче среза импульса напряжение на выводе 10 уменьшалось до 0,6 В. В этом режиме работы К1108ПП1 в выходном сигнале содержатся высокочастот- лые гармоники, недопустимые во многих случаях. Использование на выходе интегрирующих /?С-цепей обычно не дает желаемых результатов и приводит к искажению^, выходного напряжения при повышении его частоты. Подключив к выходу преобразователя фильтр, получим подавление высокочастотных гармоник на 40 дБ без искажения выходного сигнала. Степень подавления помех зависит от согласованности параметров цепей на входах ОУ. Для получения максимального подавления введен подстроечный резистор R i. Ошибки напряжения смещения нуля ОУ устраняются регулировкой сопротивления Rn2- Г,ЦАВА 12. СИСТЕМЫ ЦИФРОВОЙ ОБРАБОТКИ АНАЛОГОВЫХ СИГНАЛОВ Методы цифровой обработки аналоговых сигналов получили особенно широкое распространение после создания однокристальных БИС микропроцессоров, ЦАП и АЦП. В аналоговой электронной аппаратуре методы цифровой обработки сейчас используются в контрольно-измерительной аппаратуре, системах передачи речевых сигналов, сбора и обработки аналоговых сигналов, работающих в реальном масштабе времени, для выполнения сложной математической обработки аналоговой информации и т. д'. При проектировании такой аналого-цифровой аппаратуры возникают обычно две проблемы: как правильно выбрать входящие в них компоненты (АЦП, ЦАП, микропроцессоры, ОЗУ, регистры, компараторы и т. д.) и как правильно соединить эти компоненты, особенно если они находятся в разных блоках комплекса электронной аппаратуры. При разработке цифровых систем, для которых развит аппарат логического проектирования и моделирования, первая проблема отсутствует. Разработчики же аналого-цифровых систем должны уметь создавать оптимальные- по характеристикам приборы, оперируя с параметрами компонентов, различающимися по единицам измерения. Более того, параметры аналоговых микросхем часто нормируются для одного частного случая их работы. Решением проблемы проектирования оптимальных по параметрам аналого-цифровых систем является переход в аналоговых микросхемах к единым информационно-энергетическим параметрам, совместимым с параметрами цифровых микросхем (см. гл. 1). Однако даже в этом случае можно не получить ожидаемое качество обработки аналоговых сигналов из-за пренебрежительного отношения к организации взаимосвязей между аналоговыми и цифровыми узлами системы. Следует иметь в виду, что в аналого-цифровых системах сигналы передаются не только по линиям связи между входами и выходами узлов обработки информации, но и по шинам питания, заземления и экранирования. Особенно это справедливо для распределенных аналого-цифровых систем, таких как системы сбора и обработки аналоговых сигналов, в которых каждый составляющий узел может иметь свой источник питания и общую шину. Например, датчики аналоговых сигналов (термопары, резисторные мосты) в системе сбора и обработки могут располагаться на расстоянии десятк-ов метров и получать напряжение питания от. источников, точки заземления которых имеют потенциалы, значительно отличающиеся от потенциалов точек заземления входного АЦП или микроэвм. Таким образом, полезная информация о значении контролируемого параметра датчика поступает на вход системы обработки совместно с помехой. Сигнал помехи может представлять собой либо постоянное синфазное напряжение, либо переменное с прогнозируемым или случайным изменением параметров. Поскольку все узлы в аналого-цифровой системе должны быть взаимосвязаны, то совершенно очевидно, что при объединении точек заземления всех узлов по цепям связи будет протекать ток. Если этот ток будет изменяться в зависимости от режимов работы различных узлов системы, то общая шина станет линией передачи сигнала ошибки по всей системе. Чтобы уменьшить до минимума влияние линии связи шин заземления узлов системы, необходимо в первую очередь свести к минимуму пассивные и реактивные составляющие полного сопротивления на всех участках линии. Особенно это важно при передаче информации между узлами по экранированным проводам, экраны которых объединяются с общими шинами узлов. Все сказанное выше редко учитывается разработчиками, не имеющими опыта создания сложных аналого-цифровых систем. Вследствие этого часто возникают недоразумения, когда воспроизводимая ими известная схема не обеспечивает описаднные ее авторами характеристики. Пассивные и реактивные составляющие полного сопротивления сравнительно коротких проводников могут вызвать значительные помехи в линиях связи от цифровых частей системы к аналоговым, расположенным даже на одной плате. При несовершенных системах автоматического проектирования многослойных печатных плат, ориентированных в первую очередь на применение цифровых микросхем, и при отсутствии контроля качества плат в производстве сопротивление печатного проводника на плате может достигать 10 Ом, а емкость между проводниками в соседних слоях - до 100 пФ. Следовательно, если общая шина, шины питания или цепи передачи цифровых сигналов находятся на плате вблизи линии передачи аналоговых сигналов, то помехи в этой линии могут на входе приемника достигать амплитудных значений изменения напряжения на выходах логических схем. Даже для разработчиков чисто цифровых приборов проблема помех является не последней, особенно при использовании КМОП логических микросхем средней степени интеграции, обладающих очень высокими входными сопротивлениями. При проектировании же современных аналого-цифровых систем проблема помехозащищенности становится центральной, поскольку все большие объемы обработки информации выполняются во все меньших физических объемах приборов. При этом удельная концентрация мощности источников питания, требуемая на единицу объема современной электронной аппаратуры, продолжает = . расти, а следовательно, остается по-прежнему актуальной проблема помехоустойчивости аналоговых узлов аппаратуры в аналого-цифровых системах. Динамические погрешности, возникающие в различных частях системы из-за их неправильного взаимного соединения, могут существенно превысить суммарные статические погрешности, которые обычно и учитываются при расчетах, поскольку приводятся в технических условиях на микросхемы. К таким динамическим погрешностям относятся коммутационные помехи, создаваемые различными узлами системы и существенно увеличивающие время завершения операции, выполняемой тем или иным аналоговым узлом. Например, действие помех может существенно увеличить время преобразования ЦАП или время выборки УВХ. Указанные особенности проектирования систем цифровой обработки аналоговых сигналов должны учитываться на всех стадиях созданля таких систем, начиная ,от, разработки электрических схем узлов и их конструкций и заканчивая разработкой схемы сборки узлов в систему, включая ее конструкцию. Методы цифровой обработки аналоговых сигналов, для реализации которых необходимо применение АЦП, требуют совместимости последних с микропроцессорами как по уровням логических сигна-, лов, числу разрядов, так и по правилам обмена, т. е. интерфейсу. 12.1. РАБОТА АЦП В МИКРОПРОЦЕССОРНОЙ СИСТЕМЕ Среди выпускаемых отечественной промышленностью БИС АЦП только КП13ПВ1 отвечает основным требованиям совместимости с микропроцессорами. Кроме совместимости логических уровней АЦП должен обеспечивать передачу на микропроцессор кодов побайтно, т. е. по 8 разрядов. Обычно для представления отрицательных чисел микропроцессоры используют дополнительный код, что должно предусматриваться в АЦП. Выходной регистр АЦП должен обеспечивать работу в трех состояниях, т. е. с отключением по внешней команде оТ шины данных микропроцессора. Желательна возможность обращения к выходным данным АЦП по некоторому адресу, что позволяет микропроцессору воспринимать АЦП как одну из ячеек памяти. Поскольку интерфейсы микропроцессоров разных типов различны, то и требования к интерфейсу АЦП должны быть обобщенными. В тех случаях, когда АЦП не может непосредственно быть подключен к микропроцессору, то либо применяют БИС ввода-вывода (интерфейсные адаптеры), обычно содержащиеся в любом микропроцессорном наборе, либо проектируют схему сопряжения на цифровых микросхемах общего применения [71]. В тех случаях, когда к быстродействию АЦП не предъявляются высокие требования, аналого-цифровое преобразование можно выполнить с помощью микропроцессора. За счет этого упрощаются не только связи между микропроцессором и источником аналого вого сигнала, но и схема цифровой обработки аналоговых сигналов в целом (рис. 12.1). Используя показанную структурную схему, программными средствами можно реализовать АЦП последовательного приближения следящего типа со ступенчатым пилообразным напряжением. Если, например, реализуется АЦП последовательного приближения, то выполняется следующая подпрограмма. В интерфейсном адаптере (ИА) назначаются регистры, работающие с ЦАП и управляемые от компаратора. Затем подготавливается управляющая память ИА и с помощью схемы управления в ИА устанавливается указатель разряда. Если выбранный разряд не последний, то он устанавливается в положение, соответствующее напряжению лог. 1. Если на выходе компаратора при этом установится напряжение лог. 1, то лог. 1 в первом разряде сохранится и запишется лог. 1 в следующий разряд и так далее (см. гл. 11). Таким образом, микропроцессор взял на себя функции регистра последовательного приближения и запоминающего регистра, реализовав их программно. Узел ИА обеспечивает только сопряжение ЦАП и микропроцессора. При совместной работе АЦП с микропроцессором обы11но используется одна из трех описанных ниже процедур обмена, в основе которых лежит либо контроль окончания преобразования, либо прерывание, либо прямой доступ к памяти. Объясняется это тем, что АЦП работают в асинхронном режиме по отношению к микропроцессору. Поэтому возникает проблема согласования работы АЦП и микропроцессора. Если не согласовать моменты обмена информацией, то ввод результатов преобразования может произойти, когда оно еще не завершено. Согласование заключается в том, чтобы в течение времени преобразования ИА не допускал обращения микропроцессора к  Интврфшс- ныи, адаптер Дешифра- тор адреса i Ланные Управление Рис. 12.1. Структурная схема АЦП на базе микропроцессора АЦП, а после завершения преобразования ИА сообщал об этом микропроцессору. При реализации такой процедуры процесс обмена данными между АЦП и микропроцессором будет состоять из трех операций: запуск преобразования, проверка микропроцессором готовности результата преобразования и ввод информации. При обмене после окончания преобразования микропроцессор должен получить информацию о завершении преобразования и готовности ИА к передаче данных. Для этого служит флаг готовности, который выставляется ИА и периодически опрашивается микропроцессором в процессе выполнения основной программы. Такая процедура обмена не обязательно должна быть инициирована со стороны АЦП, но может выполняться и программой микропроцессора. Для этого сигналы запуска посылаются АЦП в моменты времени, определяемые программой, но не. чаше, чем АЦП может преобразовать любое значение входного аналогового сигнала. На эти сигналы ИА реагирует выдачей очередного результата преобразования и запуском нового цикла преобразования в АЦП. После того, как пройдет достаточное время для преобразования нового значения аналогового сигнала в код, программа, исполняемая в микропроцессоре, может снова обращаться к ИА. В основу второй процедуры обмена с АЦП положена способность большинства микропроцессоров прерывать выполнение программы в ответ на внешнее событие и выполнять специальную подпрограмму обработки этого события. Таким событием может быть завершение в АЦП цикла преобразования. Обычно использование прерывания программы, выполняемой микропроцессором, является более эффективным способом обмена с АЦП, чем непрерывное опрашивание флага ИА, особенно если время преобразования в АЦП зависит от,приращения аналогового сигнала относительно своего предыдущего значения. Обнаружив запрос на прерывание, микропроцессор откладывает выполнение основной программы и переходит к выполнению подпрограммы прерывания. После выполнения этой подпрограммы по команде возврата микропроцессор продолжает исполнение прерванной основной программы. Если микропроцессор в аналого-цифровой системе обрабатывает информацию от нескольких АЦП, то возникает проблема идентификации устройства, выставившего запрос на прерывание. Идентификация необходима, чтобы выполнить именно ту подпрограмму, которую нужно. Эта проблема решается обычно двумя способами. Для реализации первого способа должна существовать программа обработки прерываний, которая при поступлении запроса проверяет состояние ИА каждого АЦП и находит требующий обслуживания. Этот способ называют прерыванием с программным опросом. Для реализации второго способа необходимо дополнительное устройство идентификации АЦП, выставившего запрос, которое формирует адрес требуемой подпрограммы обращения. Этот способ называют векторным прерыванием. в случае прерываний с программным опросом все запросы на прерывание поступают по одной управляющей линии. Эта линия обычно соединена с выходом элемента ИЛИ, на входы которого поступают запросы от ИА всех АЦП. Когда по общей линии в микропроцессор поступает запрос от любого АЦП, то задерживается выполнение текущей команды в микропроцессоре и осуществляется передача управления в некоторую ячейку памяти с фиксированным адресом. При заполнении этой ячейки начинается выполнение программы обработки прерываний. Если же поступает. несколько запросов на прерывание, то программа обычно обслуживает то устройство, которое раньше попадается в установленном в подпрограмме порядке опроса. Главным недостатком этого метода o6f)a6oTKH запросов от нескольких АЦП является затрата времени на опрос состояний нескольких АЦП, прежде чем будет найден нужный. Если такая задержка слишком велика (например, при использовании большого числа АЦП) или просто нежелательна, то предпочтительно использование векторной системы прерываний, поскольку при ее использовании сразу известен АЦП, выставивший запрос. В подсистемах сбора и обработки аналоговых сигналов от многих датчиков либо в контрольно-измерительных системах, накапливающих в буферных ОЗУ большие массивы информации об изменениях аналоговых сигналов за значительные интервалы времени, требуется единовременная передача в микро'процессоры больших массивов информации [72]. В таких случаях описанные выше способы обмена АЦП с микропроцессором неэффективны и применяется третий способ - прямой обмен с ОЗУ микропроцессора. Такой обмен без непосредственного участия выполняемой микропроцессором программы называют прямым доступом к памяти. Обмен данными в режиме прямого доступа к памяти отличается от программно-управляемого обмена тем, что управляет обменом внешнее устройство - обычно специальная микросхема в микропроцессорном комплекте. Можно выделить четыре области совместного применения АЦП с микропроцессорами: контрольно-измерительная аппаратура, системы связи, сбора и цифровой обработки аналоговых сигналов. В каждой из этих областей имеются свои особенности организации совместной работы АЦП с цифровой аппаратурой. Например, в системах связи обычно ограничен динамический диапазон обрабатываемых сигналов и определены алгоритмы обработки. Системы сбора и обработки требуют решения проблем связи узлов, расположенных друг от друга на значительных расстояниях. Эти же и новые проблемы приходится решать при создании микропроцессорных контрольно-измерительных систем. Таким образом, предложенное разделение областей применения АЦП достаточно условно и рассматриваемые ниже особенности применения АЦП могут в значительной степени относиться ко всем областям. 1 ... 29 30 31 32 33 34 35 ... 38 |